TEMA 8
EL APRENDIZAJE MOTOR. PRINCIPALES MODELOS EXPLICATIVOS DEL APRENDIZAJE MOTOR. EL PROCESO DE ENSEÑANZA Y DE APRENDIZAJE MOTOR. MECANISMOS Y FACTORES QUE INTERVIENEN
- Aquí puedes ver el TEMARIO para Maestro de Educación Física en Primaria.

ÍNDICE
1. CONCEPTO DE APRENDIZAJE MOTOR YPRINCIPALES MODELOS EXPLICATIVOS.
1.1. Concepto de aprendizaje motor.
1.2. Principales modelos explicativos del aprendizaje motor.
1.2.1. Introducción
1.2.2. Las aportaciones del modelo TOTE.
1.2.3. Et modelo de Bemstein.
1.2.4. La teoría de Adams.
1.2.5. La teoría de Schmidt
1.2.6. El modelo de Welford (el control motor entendido como procesamiento de la información).
1. 3. El modelo de procesamiento de la información (ampliación).
1.3.1. El mecanismo perceptivo.
1.3.2. El mecanismo decisional.
1.3.3. El mecanismo efector.
1.3.4. El control de la respuesta motriz.
2. FACTORES QUE INFLUYEN EN EL APRENDIZAJE MOTOR.
2.1. Factores ligados al sujeto.
2.1.1. El nivel de activación.
2.1.2. Los conocimientos previos y la transferencia entre aprendizajes.
2.2. Factores ligados a la tarea.
2.2.1. Factores ligados al aspecto perceptivo.
2.2.2. Factores ligados a la toma de decisión.
2.2.3. Factores ligados a la ejecución de la habilidad.
2.3. Factores ligados a la situación de enseñanza-aprendizaje.
2.3.1. La transmisión de información.
2.3.2. La cantidad de práctica.
2.3.3. Duración y distribución de la práctica.
2.3.4. La adaptación de la situación de enseñanza-aprendizaje a las características de los alumnos.
2.3.5. La especificidad de la situación de enseñanza-aprendizaje.
TEMA 8 de Educación Física para Primaria
Resumen del tema
Este tema recoge dos grandes bloques de contenido relacionados con el aprendizaje motor. El primer bloque, que corresponde al apartado 1, trata sobre el concepto y los principales modelos explicativos del aprendizaje motor.
Para definir el concepto de aprendizaje motor hemos intentado sintetizar las definiciones que de éste dan diversos y representativos autores, marcando unos aspectos clave para definir este concepto.
En cuanto a los modelos explicativos, hemos escogido los, a nuestro juicio, más importantes. Así daremos las características más importantes de los modelos TOTE, de Bemstein, de Adams, de Schmidt y de Welford.
Sobre este último, es decir, sobre la concepción del control motor como un proceso de tratamiento de la información, nos extenderemos más dado que, en el apartado siguiente, nos basaremos, en parte, en él para determinar algunos de los factores que influyen sobre el proceso de enseñanza-aprendizaje motor.
El segundo bloque de contenidos se trata en el apartado 2 y consiste en un análisis de los diferentes factores que influyen en el proceso de enseñanza y aprendizaje motor.
Para ello, y con el fin de facilitar la sistematización y comprensión, clasificaremos estos factores en res grupos.
En el primero se analizarán los factores relacionados con el aprendiz, tales como el nivel de activación y los conocimientos previos de éste.
En el segundo nos centraremos en el análisis de los factores ligados a la tarea que se aprende, utilizando para ello el modelo de tratamiento de la información.
En el tercero se revisarán los factores propios de la situación de enseñanza y aprendizaje.
Somos conscientes que esta clasificación es artificial y que los diferentes factores tratados en cada uno de los tres grupos presentan una alta interrelación entre sí. Repetimos que si hemos procedido a esta clasificación ha sido, simplemente, con la intención de facilitar la comprensión de los contenidos de este apartado
DESARROLLO DE LOS CONTENIDOS
1. CONCEPTO PE APRENDIZAJE MOTOR Y PRINCIPALES MODELOS EXPLICATIVOS.
1.1. Concepto de aprendizaje motor.
Partiendo de diferentes definiciones de aprendizaje motor (Lawther [1983], Simonet [1985], Singer [1986], Riera [1989b] y Schmidt [1982]) y en un intento de síntesis, podemos destacar los siguientes aspectos como los más importantes dentro del concepto de aprendizaje motor
1) Dado que no hablamos de aprendizaje en general, sino de aprendizaje motor creemos que uno de los aspectos significativos de la definición de éste debe ser el carácter fundamentalmente motriz de las respuestas producidas. Somos conscientes de que en la ejecución motriz humana se implican aspectos, procesos y mecanismos de muy variada índole.
2) Aprender significa, de alguna forma, cambiar. El resultado de un proceso de aprendizaje es un cambio en el comportamiento del sujeto en relación directa con el entorno de ejecución.
3) Este cambio debe ser relativamente permanente.
4) Este cambio se debe a la práctica ya la experiencia, y no a aspectos contextuales (fatiga, crecimiento).
5) Aunque existen diferentes puntos de vista sobre el carácter observable o no observable delaprendizaje motor, coincidimos con Schmidt al afirmar que lo que podemos observar esel producto del aprendizaje, y no los procesos que le subyacen.
6) El aprendizaje es específico, en tanto en cuanto cada sujeto en concreto interactúa de una forma específica dadas unas condiciones determinadas del entorno. Esta especificidad debe ser interpretada de una forma amplia, entendiendo que el objetivo del aprendizaje no es la adquisición de gestos concretos sino el aumento de la eficacia frente a una determinada situación y que esta «capacidad» de responder de forma eficaz puede ser «extrapolable» a otras situaciones semejantes.
7) Tal y como pasaba en relación al punto 5, existen posturas enfrentadas a la hora de valorar el posible carácter negativo de los aprendizajes. Somos de la opinión, de acuerdo con Schmidt, que sí pueden existir aprendizajes de carácter negativo, dado que el objetivo del aprendizaje es, como se ha comentado, ser más eficaz frente a una situación determinada y esto no sólo puede no conseguirse sino que incluso se puede provocar un descenso en laeficacia producto de un proceso de aprendizaje.
1.2. Principales modelos explicativos del aprendizaje motor.
1.2.1. Introducción
Los modelos que a continuación se recogen representan diferentes intentos de comprensión, no del aprendizaje como del control motor.
Tal y como afirma Singer «En alguna época los términos aprendizaje motor y control motor se empleado indistintamente. Actualmente parece ser que aprendizaje motor tiene más relación con condiciones convenientes para mejorar el aprendizaje (y la acción motora) mientras que control motor parece más relacionado con el proceso interno que actúa bajo condiciones específicas.»
Aun admitiendo esta diferenciación hemos optado por recoger en estas líneas los modelos explicativos del control motor y no los modelos generales sobre el aprendizaje. Algunas de las razones nos han movido a ello son las siguientes:
– El hecho de que, en obras recientes relativas al aprendizaje motor (Riera 1989a, Simonet 1983) se recojan estos modelos (y no los generales sobre aprendizaje) como explicativos del aprendizaje motor.
– La gran interrelación entre los procesos de control y aprendizaje motor, entendiendo que el segundo no es más que una forma de mejorar el primero.
– Como consecuencia de la afirmación anterior, la mayor especificidad y aplicación al campo de la educación física de los modelos relativos al control motor en relación a los modelos generales sobre el aprendizaje.
Como característica general a todos estos modelos podemos destacar la influencia que sobre ellos ejercen diferentes áreas del conocimiento de aparición relativamente reciente como por ejemplo la cibernética y la teoría de sistemas (utilización de organigramas, conceptos como «entrada» o «salida» del sistema,…), la informática (en conceptos como «programa motor», «subrutina»,…) y, en el caso concreto del modelo de Welford, la teoría de la información.
1.2.2. Las aportaciones del modelo TOTE.
Elaborado por Miller, Galanter y Pribram en 1960 inspirándose en los trabajos de James [1950], constituye un intento, avanzado en su época, de explicación de los procesos cognitivos implicados en el control del movimiento.
Su motivación principal fue explicar las relaciones existentes entre la imagen del movimiento (previa a la ejecución dé éste) y la acción realmente desencadenada, es decir describir las relaciones entre la intención y la realización.
Para ello integra la noción de feedback o retroinformación, necesaria para poder conocer los resultados de la acción y así compararlos con las intenciones inicialmente previstas.
Este modelo toma el nombre de las siglas de los diferentes elementos que contempla (Test ->Operate->Test->Exit) en el control de los movimientos (Figura 1):
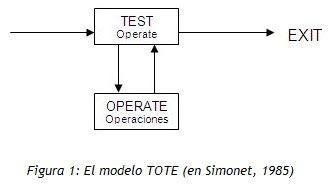
Figura 1: El modelo TOTE (en Simonet, 1985)
– “ Test»: Consiste en la evocación de la imagen del movimiento con la finalidad de conseguir el resultado deseado.
– “Operate”: o puesta en práctica de las acciones ideadas. Implica la producción de programas motores.
– «Test»: Consiste en un retomo de la información y comparación de ésta con la imagen («test») previa. En caso de existir una incongruencia frente al resultado esperado y el obtenido se genera una señal de error que origina la generación de nuevas operaciones para reducir la diferencia entre el valor obtenido y el deseado.
– «Exit»: Implica, sólo en casos de congruencia entre los valores esperados y los obtenidos, la salida, el fin de las operaciones.
Vemos, por tanto, que en la concepción de este modelo, se contemplan^ dos conceptos importantes:
-Por un lado la Imagen del movimiento, es decir un conjunto de conocimientos almacenados relativos tanto al entorno como al organismo y específicos de una actuación concreta.
– Por otro lado el plan motor asimilable al concepto de «programa» informático, encargado de generar la respuesta deseada.
1.2.3. El modelo de Bernstein.
En 1947 Bernstein concibió su modelo de control motor que, de hecho, constituye la primera formulación de un sistema de control en bucle cerrado.
Según recoge Rigal [1987], en el modelo de control de Bernstein intervienen diferentes estructuras en un orden preciso de actuación. Es por este motivo que, siguiendo a Simonet podemos distinguir los siguientes elementos constitutivos del modelo:
– Un efector encargado de producir la actividad motriz regulada por unos parámetros específicos.
– Un elemento de control del sistema, encargado de estipular el «valor de referencia» (las condiciones ideales de la ejecución)
– Un receptor que capta las variables producidas por la salida motriz («valor real»)
– Un mecanismo comparador, que establece la diferencia en términos de amplitud y dirección del error. Es decir que compara los efectos deseados con los obtenidos, determinando el error producido.
– Un codificador o traductor, que convierte la señal de error en un conjunto de órdenes encaminadas a corregir el movimiento.
– Y, por último, un regulador que asegura el control de funcionamiento del efector en relación con las diferentes especificaciones de los parámetros.
El interés de estemodelo radica, por un lado en la existencia, a nivel central, de una imagen del movimiento que controlará su desarrollo y, por otro lado, en la constante adaptación de éste a las características del entorno donde se realiza.
Tal y como destaca Corraze [1988] esta subordinación del programa motor a las características concretas de la situación en la que se aplica conlleva que un propio programa motor pueda, en relación a diferentes tipos de factores, tener como resultado la ejecución de movimientos diferentes en función de las características del contexto donde se desarrolla.
1.2.4. La teoría de Adams.
Basándose en numerosos autores (Bemstein, Sokolov, Anochine,..) Adams publicó en 1971 su teoría del bucle cerrado («Closed loop theory») que ha generado una multitud de trabajos e investigaciones posteriores.
Tanto las situaciones experimentales que le sirvieron de base para la elaboración de su teoría como el campo de aplicación de ésta, se reducen a los movimientos lentos y continuos’5′, aunque sus seguidores sean responsables, en palabras de Simonet de una aplicación abusiva de las conclusiones de Adams.
Una de las mayores aportaciones de Adams radica en la formulación de los conceptos de huella mnésica y huella de reconocimiento ambos implicados, de diferente manera, en la generación y el control de respuestas motoras.
– Huella mnésica: La huella mnésica es la encargada de seleccionar e iniciar la respuesta motriz, constituyendo lo que se ha venido a llamar un «programa motor limitado» cuya única función es especificar la «orientación y dirección general del movimiento»
Se forma, de manera progresiva, gracias al conocimiento de los resultados de ensayos anteriores y está conformada por parámetros motrices.
-Huella perceptiva: Consiste en un almacenamiento en la memoria (fruto de las repeticiones sucesivas de la tarea) de diversos parámetros sensoriales originados por la puesta en práctica de la respuesta motora. Las fuentes de información utilizadas para crear esta huella perceptiva cabe buscarías, según Simonet (op cit) entre:
– La retroacción propioceptiva
– La retroacción esteroceptiva
– El conocimiento de los resultados
La función de la huella perceptiva es guiar y controlar la ejecución del movimiento, constituyéndose en un valor de referencia que representa el modelo interno de las consecuencias sensoriales originadas por una buena ejecución de la tarea. De esta forma, controlar el movimiento supone comparar, e intentar reducir diferencias, los valores actuales (producto de la ejecución del gesto) con los valores ideales (huella perceptiva).
Imaginemos a un sujeto intentando trazar líneas rectas de una longitud constante y determinada sin poder disponer del control visomotor de su acción. La huella mnésica, formada a partir de los parámetros motrices de las ejecuciones anteriores, iniciará el movimiento (en el ejemplo el desplazamiento del lápiz de izquierda a derecha) mientras que la huella perceptiva, formada a partir de las consecuencias sensoriales de las anteriores ejecuciones) le servirá para determinar, tanto la dirección y sentido del trazo, como el momento en el que debe finalizar la acción. Lógicamente la práctica será fundamental para poder conformar, de forma correcta, ambos esquemas y, de esta forma, para aumentar la eficacia del movimiento. En este contexto se puede comprender el importante papel del conocimiento de los resultados en el aprendizaje motor.
Todos los modelos presentados hasta este momento hacen relación a la ejecución de movimientos que permiten el control por retroacción. En efecto, se trata de movimientos continuos y de una duración relativamente larga, por lo que es posible una regulación de los mismos conforme se van desarrollando.
Sin embargo, tal y como afirma Schmidt [1993], tanto en la vida cotidiana como en la actividad deportiva se da una gran cantidad de movimientos de rápida ejecución, los llamados movimientos balísticos, que, precisamente por este hecho, no permiten su regulación por retroacción.
Esto lleva a pensar en la existencia de una organización neurona! previa capaz, por si sola, de generar este tipo de movimientos. Es decir, lleva aja noción de Programa motor.
De esta forma, los programas motores supondrían un conjunto de órdenes, almacenadas en el sistema nervioso central y encargadas de la generación de los diferentes movimientos. Sin embargo, esta concepción de los programas motores plantea dos grandes problemas:
– La enorme variedad de posibles formas de ejecución de una misma habilidad. En efecto, una misma habilidad puede, tal y como se ha afirmado en el apartado 1.2.3 de este tema, presentar múltiples variaciones en su ejecución debido tanto a las características del entorno,como a aspectos ligados a la situación del ejecutante (postura corporal,…). Un ejemplo clásico de este hecho lo constituye la posibilidad de efectuar nuestra firma con diferentes segmentos corporales (mano no habitual, sosteniendo el lápiz con la boca o con el pie,…) aunque no se haya practicado con anterioridad. Teniendo en cuenta la enorme variedad de habilidades motrices que somos capaces de efectuar y añadiéndole la no menos enorme variedad de formas de ejecución que estas pueden adoptar, si para cada ejecución diferente precisáramos de la existencia de un programa motor propio tendríamos que tener almacenados en nuestra memoria un número casi infinito de programas motores, cosa la cual, dada la limitación de capacidad de nuestra memoria, no parece posible.
-Por otro lado tenemos, según afirma Schmidt, que los altamente diestros en una disciplina deportiva, son capaces de «inventar» sobre la marcha respuestas motoras que no han realizado jamás con anterioridad pero que les son útiles para resolver con éxito una situación determinada (la visión de un partido de tenis correspondiente a la final de un gran torneo nos proporcionara, seguramente, la posibilidad de contemplar la ejecución de multitud de estas respuestas motoras aparentemente inéditas).
Estos hechos llevaron a Schmidt a formular, en 1975, la teoría de los programas motores generalizados o esquemas motores. Antes de entrar en el concepto de esquema motor, es conveniente puntualizar qué se entiende por esquema.
Pongamos un ejemplo. A pesar de la gran variedad de razas caninas y de las diferencias, a veces importantísimas, que entre ellas se dan, la simple visión de un peno, sea cual sea su raza, nos hace reconocerlo como tal, incluso aunque sea la primera vez que vemos un perro de esa raza concreta. Esto ocurre así porque, fruto de nuestras experiencias anteriores, tenemos almacenada en nuestra memoria una «idea general» de lo que es un perro, un conjunto de reglas, un esquema al fin y al cabo, que nos permite identificar y agrupar a las diferentes razas caninas bajo el concepto de «perro».
De esta forma, un esquema es, en palabras de Evans [1967] «la característica de una población determinada de objetos, y se compone de un conjunto de reglas que sirven de instrucción en la producción de un prototipo de la población (el concepto)» (en Simonet, p 89).
Aplicando el concepto de esquema al control motor, tenemos que lo que almacenamos en nuestra memoria, según la teoría de Schmidt, no son patrones motores concretos y específicos para la ejecución de un gesto único, sino esquemas motores que guían la ejecución de «familias» de habilidades motrices. Es decir, que un jugador de baloncesto no almacena un patrón motor específicopara cada lanzamiento a canasta, sino que almacena un patrón motor generalizado del «lanzamiento a canasta», patrón que es capaz de adecuar y adaptar en cada situación concreta de ejecución.
Esta explicación del control central permite solucionar los dos problemas mencionados con anterioridad:
Por un lado, la existencia de esquemas motores en lugar de programas motores específicos para cada gesto permite explicar que, aun teniendo en cuenta la limitada capacidad de nuestra memoria seamos capaces de ejecutar una amplia variedad de respuestas motoras.
Por otro lado permite explicar la ejecución de respuestassupuestamente nuevas. Decimos supuestamente nuevas porque, de hecho estas respuestas no constituirían una creación a partir de «la nada» sino, simplemente, una adaptación específica de un programa motor generalizado ya almacenado en la memoria del sujeto.
Al igual que Adams, Schmidt habla de dos tipos de esquemas implicados en la generación y el control del movimiento:
– El esquema de recuerdo (equiparable a la huella mnésica de Adams) sería el responsable de originar la respuesta motriz, estando constituido, de esta forma, por parámetros motrices (es decir, desplazamientos segmentarios, ángulos articulares,…).
– El esquema de reconocimiento (equiparable a la huella perceptiva propia de la teoría de Adams) sería el responsable del control del movimiento y estaría conformado a partir de las consecuencias sensoriales que la ejecución de la habilidad conlleva.
El origen y control de los movimientos presentará diferencias según se trate de movimientos rápidos o de movimientos lentos.
Así los movimientosrápidos, tal y como se ha afirmado anteriormente, no permiten, por su corta duración, la regulación por retroacción, por lo que su ejecución se verá únicamente regulada por el esquema de recuerdo.
Por contra, los movimientos continuos y lentos permiten su regulación por retroacción, por lo que el esquema de recuerdo se encargará de iniciarlos y el esquema de reconocimiento se encargará de controlarlos de tal forma que se ajusten a las finalidades previstas.
1.2.7. El modelo de Welford (el control motor entendido como procesamiento de la información).
Welford [1968/1976*] basa el establecimiento de su modelo en el hecho de contemplar el control motor como una serie de procesos relativos al tratamiento de la Información.
En efecto, en la ejecución de un acto motor se ven implicados una gran cantidad y variedad deformas de tratamiento de la información. Pondremos un ejemplo para clarificar este aspecto.
Imaginemos a un jugador de baloncesto enfrentado a una situación de juego. Antes de decidir la ejecución de cualquier respuesta motora, este jugador deberá extraer de sí mismo y desu entorno aquellas informaciones que le sean de utilidad para estructurar su actuación. De esta forma, deberá informarse sobre su situación en el campo, sobre la posición que ocupan sus compañeros y adversarios así como sobre sus propias posibilidades de actuación. Es decir, deberá efectuar un análisis tanto del medio en el que tiene lugar su actuación como de su propia disponibilidad para la acción.
Fruto de este análisis el jugador obtendrá una información que le permitirá decidir, de acuerdo con sus conocimientos previos (táctica, experiencia, etc…) cual es la acción más apropiada.
Una vez ha tomada esta decisión, nuestro sujeto deberá ser capaz de llevarla a cabo, es decir, de ejecutar la respuesta motora escogida, de tal forma que esta ejecución se adapte lo máximo posible a las condiciones del entorno en la que es ejecutada y a la finalidad prevista para ella.
Un mecanismo de control se encargará de verificar si esta ejecución se ajusta a los parámetros previstos y, en caso de que no sea así, de efectuar las correcciones necesarias.
Vernos, pues, que en cualquier ejecución motora podemos distinguir la existencia de unos mecanismos sucesivos y altamente interrelacionados:
-mecanismoperceptivo, cuya finalidad es la de proporcionar información al sujeto sobre el entorno en el que se mueve así como sobre sus propias posibilidades de ejecución.
– mecanismo decisional,encargado de decidir, de acuerdo con la información recibida sobre el entorno y con los conocimientos previos del sujeto, qué respuesta motora es la más apropiada dada la situación en la que se halla.
– mecanismo efectorque tiene como función organizar la ejecución de la respuesta escogida, adaptándola tanto a las características del entorno como a las finalidades de la acción.
Podríamos añadir la existencia de un mecanismo de controlque permitiría conocer las condiciones de ejecución de la respuesta motora y, en su caso, efectuar las correcciones necesarias.
Así entendido, el control motor sería posible gracias a la existencia de un sistema, compuesto por unos elementos interrelacionados que procesan una serie de informaciones de procedencia variada (del entorno, del propio sujeto, almacenadas en su memoria,…) con la finalidad de alcanzar una metaprefijada.
1.3. El modelo de procesamiento de la información (ampliación).(MARTENUIK)
1.3.1. El mecanismo perceptivo.
Tal y como se ha comentado anteriormente, de forma previa al inicio de cualquier acción motriz debemos extraer del entorno y de nuestra propia situación, toda la Información necesaria parala «posterior planificación y ejecución de tal acción. De ello se encarga el mecanismo perceptivo.
En efecto, este mecanismo responde a la pregunta «¿Qué pasa?» y tiene como función el aportar las diferentes informaciones necesarias para las siguientes fases: decisión, programación y ejecución/control de la respuesta motora. Vemos, por tanto que se trata de una fase de caudal importancia de cara a adaptar la ejecución motora a las características del entorno en la que ésta sedesarrolla.
Se trata de una etapa sensorial en la que se analiza la información procedente de diversas fuentes (vista, oído, receptores kinestésicos,…) por lo que, mediante la participación de la memoria sensorial inmediata, es necesario integrar las diversas informaciones recibidas para así obtener una imagen ajustada y completa de la realidad.
Esta conexión entre el sujeto y el ambiente es, en palabras de Durand, «extremadamente compleja, en el curso de la cual múltiples operaciones interactúan unas con otras» (Durand [1988], p 138) debiéndose además tener en cuenta que, en lamayor parte de las situaciones motrices, la atención del sujeto oscilará entre este cometido y la programación y el control de la ejecución motora que esté llevando a cabo.
En las habilidadesabiertas esta fase es de vital importancia ya que proporcionará al sujeto una información valiosísima para poder adaptar su ejecución (no previsible de antemano) a las características ambientales. Así, el sujeto deberá efectuar un análisis pormenorizado de las características del entorno, sin el cual su actuación se verá condenada al fracaso. En las habilidades cerradas, el mecanismo perceptivo pierde buena parte de su importancia, centrándose básicamente en la recepción de la información propioceptiya.
a) Búsqueda activa de la información.
Las informaciones ambientales no son recibidas de forma pasiva por el sujeto, sino que éste despliega toda una serie de acciones tendentes a obtener tal información, es decir, el sujeto es protagonista de una búsqueda activade las informaciones.
Esta búsqueda se ve facilitada por los denominados movimientos deorientación, término acuñado por Gentile y recogido por Amold quien los define como «las respuestas instrumentales utilizadas para ajustar el aparato sensorial con el fin de permitir la recepción de informaciones provenientes del entorno» (Amold [1981], p. 282). Así, el sujeto, para conseguir información sobre aquellos aspectos del entorno que considera significativos en la ejecución de la tarea que le ocupa, produce una serie de movimientos y acciones tendentes a facilitar esta recogida de información.
Pongamos el ejemplo de un jugador de voleibol que se dispone a recibir una pelota: previamente a cualquier otra acción deberá calcular la trayectoria que lleva el móvil para lo que deberá dirigir su vista hacia el. De esta forma, el movimiento de los ojos, de la cabeza y del cuerpo en general, serán efectuados con la única función de facilitar la obtención de la información necesaria, por lo que estas acciones pueden ser catalogadas como movimientos orientación.
b) EI filtraje selectivo de la información.
Tal y como se ha comentado anteriormente, de la multitud de informaciones que recibimos (tanto del entorno como de nosotros mismos) en cada momento de nuestra actuación, despreciamos una gran cantidad de ellas y solamente nos fíjanos en aquellas que consideramos significativas en relación a la habilidad que nos disponemos a ejecutar.
Esteproceso de filtraje, situado de forma previa al tratamiento central de la información, está condicionado por diferentes factores como la edaddel sujeto, su experiencia y las características del estímulopercibido.
En lo que hace relación a la edaddel sujeto Ross (1976, recogido por Durand, op cit) habla de tres grandes etapas en lo que respecta a la selección de las informaciones significativas:
– La etapa de atención sobreexclusivaque transcurre, aproximadamente, hasta los 5/6 años y que se caracteriza por que la atención se fija (seguramente debido a la escasa capacidad de tratamiento de la información que se tiene en estas edades) en muy pocos aspectos de la tarea, que no necesariamente tienen porqué ser los más importantes o significativos de cara a la ejecución de ésta.
– La etapa de atención sobreinclusiva, que transcurre hasta los 11/12 años de edad, implica que los sujetos se fijan en múltiples aspectos de la tarea, algunos de los cuales no tienen ninguna relevancia para la correcta ejecución de ésta, lo que conlleva una práctica llena de errores y vacilaciones.
– La etapa de atención selectiva, iniciada a partir de los 12 años de edad, se caracteriza porque se presta atención a aquellos aspectos realmente significativos e importantes de la tarea. Ignorándose los superfluos. De esta forma el tratamiento de la información se vuelve económico, lo que conlleva un afinamiento de la respuesta motriz y permite que ésta se dé de forma más adaptada a las características del entorno.
Somos de la opinión de que estas tres etapas dependen en buena medida del nivel de experiencia del sujeto en relación con la tarea propuesta. Es decir que creemos que, si bien la edad y la maduración que ésta implica tienen importancia en la evolución de la capacidad de tratamiento de la información, también la tiene el nivel de práctica o entrenamiento desarrollado.
En efecto, el nivel de experiencia previa del sujeto es uno de los factores clave a la hora de analizar el proceso defiltraje selectivo. Un experto se diferencia de un principiante, entre otras cosas, por su capacidad de fijar la atención en lo significativo e ignorar lo no significativo. Dicho de otra forma, la práctica bien conducida conlleva un aprendizaje sobre qué es importante y qué no lo es para la realización de la actividad propuesta.
Duránd recoge en su obra múltiples ejemplos de investigaciones que confirman este hecho. De estos estudios se desprende que el experto actúa, en la percepción de las características delambiente, de forma mucho más sistemática, rápida y efectiva que el novato, lo que le produce un“ahorro» de tiempo y de atención que, sin duda, es uno de los factores que explica su más refinadaejecución.
Por último, se deben igualmente tener en cuenta las características de losestímulos presentados. Con esto queremos decir que a veces ciertos estímulos que, por su irrelevancia, no deberían ser tenidos en cuenta, son tratados debido a sus especiales características (intensidad, factor «sorpresa», etc.) interfiriendo en la normal ejecución de la habilidad motriz.
¿Qué papel debe adoptar el docente en relación al proceso de la atención selectiva? Parece claro que una de las funciones más importantes del/la profesor/a será la de hacer ver a los practicantes dónde están los aspectos significativos y dignos de ser tenidos en cuenta de la habilidad que se está intentando enseñar.
Así, al guiar la atención de los alumnos se facilita el proceso de filtraje selectivo, lo que va a llevar implícito un ahorro de tiempo y esfuerzo en la fase perceptiva de la tarea con el consiguiente beneficio de cara a la ejecución correcta de ésta.
c) La abstracción de las características del ambiente.
Lógicamente todo este proceso de búsqueda activa y de selección de información no se detiene en este punto. Es decir, el sujeto no se puede conformar con obtener información sobre su entorno, sino que debe efectuar toda una serie de operaciones de abstracción y deducción que le lleven a una formulación de juicios sobre las propiedades y características del entorno en el que ejecuta la habilidad motriz.
Así, posteriormente a la «captura» de informaciones del medio viene una fase en la que se les dota a estás de significado. Este «dotar de significado» a las informaciones recibidas se efectúa a diferentes niveles.
En este sentido, Duránd afirma que «La actividad de abstracción permite, por ejemplo, analizar la disposición de los jugadores en los deportes colectivos y comprender su significado en términos de defensa, ataque,…» y, más adelante «También permite, a partir de la lectura de la trayectoria de la pelota, calcular su desplazamiento y predecir el punto donde caerá» (Duránd p 141).
Diversos estudios parecen confirmar que los expertos necesitan, de cara a efectuar estaabstracción de las características del entorno, menos cantidad de información que los principiantes.
Así, por ejemplo, a un experto le bastará seguir durante muy pocos instantes la trayectoria de un móvil para deducir donde y cuando impactará con el suelo, mientras que un principiante necesitará seguirla durante mucho más espacio de tiempo para llegar a la misma conclusión.
Esta capacidad de abstracción parece depender igualmente de la edad del sujeto (Duránd) de tal forma que, a menor edad más información es necesaria para dotar de significado a lo que se percibe.
La abstracción de las características del ambiente será tanto más importante cuanto menos estable sea el entorno en el que tenga lugar la acción. Así, en las tareas cerradas, caracterizadas como se ha comentado anteriormente por ser ejecutadas en un entorno estable, la atención se centrará en la abstracción de las características espaciales y físicas de la situación con la finalidad de adaptar la respuesta motora a tales parámetros. Por contra, en las tareas abiertas, es decir en aquellas que se ejecutan en entornos variables y cambiantes, la abstracción de las características del ambiente tiene como finalidad, además de la mencionada para las tareas cerradas, el llegar a una predicción, por anticipación, de los hechos que ocurrirán;
d)La anticipación
La anticipación es una estrategia utilizada para reducir el tiempo de reacción ya que, al prever la situación futura, permite organizar de antemano la respuesta motora.
Imaginemos un portero de fútbol intentando detener el lanzamiento de un penalty. El estímulo que, en principio, debería desencadenar su respuesta motora es la trayectoria de la pelota. Así debería esperar a comprobar la dirección y velocidad de ésta para decidir qué acción efectuar y de que forma efectuarla (hacia dónde lanzarse, a qué altura, con qué profundidad,…). Tal y como se ha comentado anteriormente, estos procesos de percepción, decisión y programación de la respuesta motora consumen tiempo y, dada la gran velocidad que llevará el balón al ser chutado, si el portero espera al inicio de la trayectoria para iniciar su actuación, seguramente llegará tarde; es decir que llegará al lugar correcto para interceptar el balón (si las estimaciones efectuadas y las acciones ejecutadas son las correctas) pero lo hará cuando éste ya haya pasado, con lo que no podrá cumplir con el objetivo de detener el balón.
¿Qué estrategia utilizan entonces los porteros cuando se enfrentan a un lanzamiento de la máxima falta? Simplemente anticipan la respuesta. En lugar de fijarse, para determinar su acción posterior, en la trayectoria del balón ya lanzado, lo hacen en las diferentes acciones del jugador que se dispone a chutar el balón deduciendo, de estas acciones, qué trayectoria llevará la pelota. Esto les permite iniciar su actuación antes y así llegar al punto donde presumiblemente interceptarán el balón en el momento oportuno.
Vemos pues que anticipar no es más que utilizar, como desencadenante de la respuesta, un estímulo previo al que se utilizaría en condiciones normales, con la finalidad de disponer de más tiempo para la percepción, decisión y ejecución de la respuesta.
Para conseguir esto es importante que el estímulo «anticipado» escogido nos indique, en la forma más clara y segura, cual será el estímulo originariamente desencadenador de la respuesta. Es decir, se debe saber establecer una relación fiable entre el estímulo previo y el estímulo «real».
Como podremos entenderla regularidad en la presentación de los estímulos favorece el uso de la anticipación. Supongamos el caso hipotético de un jugador que siempre lanzara el balón a la portería de la misma forma, con la misma trayectoria, intensidad y colocación. Al portero le sería fácil anticipar la ejecución de su respuesta puesto que el delantero es absolutamente regular en su ejecución lo que permite prever, con un grandísimo margen de acierto, la respuesta que efectuará y por tanto desencadenar la acción correspondiente aun antes de que esta se haya producido. Por contra imaginemos a otro jugador con un repertorio muy amplio de posibles respuestas, es decir con muchas posibles formas de lanzamiento a portería. En este caso al portero le será muy difícil anticipar su actuación ya que, dada la gran variedad de posibilidades de ejecución de su contrario, deberá esperar a tener información sobre qué forma de lanzamiento realizará éste para poder responder con un mínimo de garantías de éxito.
Se ha hablado hasta ahora de las ventajas de la utilización de la anticipación. A continuación expondremos algunos de sus riesgos.
Es frecuente, incluso en los mejores porteros del fútbol internacional, observar que el guardameta se lanza en una dirección errónea, incluso contraria, a la trayectoria del balón. ¿Por qué ocurre esto? La explicación a este hecho puede radicar en que la interpretación que se ha hecho del estímulo «anticipado», es decir del estímulo previo al real escogido como desencadenante de la «respuesta, no ha sido correcta: se han interpretado mal las señales, los movimientos, las acciones del delantero lo que ha llevado al portero a programar y ejecutar una respuesta equivocada, no adaptada a la situación real. De hecho, los jugadores que se disponen a lanzar una falta máxima intentan «engañar» al portero, intentan hacerle creer que el balón irá en una dirección para luego enviarlo en otra, lo que ocasionará que éste no pueda detenerlo.
Vemos, por tanto, que el uso de la anticipación tiene su riesgo más importante en la elección y ejecución de una respuesta no adecuada. Si esto ocurre, quien ejecuta la acción no sólo no gana tiempo sino que incluso lo pierde ya que debe, al darse cuenta de su error, «desprogramar» la respuesta inicialmente prevista y entrar en el proceso de percepción, decisión y ejecución de una nueva respuesta, lo que le llevará a un desajuste temporal que, seguramente, le conducirá al fracaso.
Esta circunstancia se agrava si se ha iniciado la ejecución motora de la respuesta ya que, a lo comentado anteriormente (desprogramación de la respuesta prevista y programación de la nueva respuesta) se debe añadir el tiempo que se invierte en corregir las consecuencias de la acción ya iniciada. Pongamos un ejemplo. Imaginemos un jugador de tenis recibiendo el resto de su adversario; fruto del uso de la anticipación decide, por ejemplo, desplazarse hacia la derecha ya que prevé que es en este lado donde recibirá la pelota. Si ésta finalmente es dirigida hacia la izquierda, el jugador deberá, no sólo desprogramar su respuesta y programar un desplazamiento rápido hacia el lado contrario, sino corregir los efectos de su primer desplazamiento (reequilibrarse, colocar los segmentos en condiciones de ejecutar el desplazamiento,…) con lo que perderá tanto tiempo que, posiblemente, no llegue a interceptar el resto de su adversario.
En cuanto a los tipos de anticipación, varios autores (Durand, Schmidt,…) distinguen entre anticipación espacial y anticipación temporal.
La anticipación espacial permite prever el lugar en el que tendrá lugar una determinada acción antes de que ésta ocurra. Por ejemplo, del análisis de la trayectoria de un móvil se puede deducir, anticipar, el lugar en el que este móvil caerá al suelo. La anticipación temporal permite prever el momento en el cual tendrá lugar una determinada acción. Así, en el ejemplo puesto anteriormente, del análisis de la trayectoria del móvil, también se podría desprender en qué momento impactará éste contra el suelo.
1.3.2. El mecanismo decisional
A) Concepto.
Una vez abstraídas las características del entorno se pasa a la fase de selección de la respuesta, es decir, se entra en el mecanismo decisional.
Tal y como se deduce de su nombre, este mecanismo se pregunta ¿Qué hacer?, y a esta pregunta se intenta responder basándose, por un lado, en las finalidades deseadas y, por otro, en las características del entorno en el que se desarrolla la acción.
Para ello, según Durand, se deben efectuar dos tipos de acciones: primeramente se produce la búsqueda activa en un repertorio de respuestas posibles, seguida en segundo término por la elección de un programa pertinente. Se ha especulado con la posibilidad de que, frente a una situación más o menos conocida, los sujetos experimentados sean capaces de efectuar una «preselección» de respuestas probables que pasarían a conservar en la memoria a corto término para su posterior utilización.
Así, el sujeto experto enfrentado a una situación conocida «traslada» desde la memoria a largo plazo hasta» la memoria a corto plazo, un número indeterminado de posibles respuestas a ejecutar con lo que la búsqueda de la respuesta definitiva, al hacerse entre un repertorio limitado de respuestas, se agiliza.
Se ha comprobado (Durand), que los procesos de decisión son más lentos en el niño que en el adulto. La explicación a este hecho puede buscarse, por un lado en la dificultad de los niños en buscar los programas en la memoria a largo término y, por otro lado, en la dificultad que, al parecer por su escasa capacidad mnemónica, tienen en efectuar la «preselección» antes mencionada, es decir el almacenamiento previo en la memoria a corto término, de determinados programas motores.
B) La toma de decisión en las tareas abiertas y en las tareas cerradas.
¿Cómo varía latoma de decisión en las habilidades abiertas y en las cerradas? Imaginemos a un saltador de longitud antes de efectuar su intento. Además de no tener apremio temporal apreciable para iniciar su repuesta (disponen de un minuto y medio para realizar su salto), tampoco tiene una gama amplia de respuestas donde escoger ya que su actuación se ciñe a la reproducción, adaptada a las ligeras variaciones de cada aplicación concreta (estado de la superficie de carrera y salto, tipo de pista, condiciones del viento,…), de un programa previamente fijado y entrenado.
Por contra, imaginemos la actuación dé un jugador de tenis intentado devolver una pelota: de forma posterior al análisis perceptivo debe escoger, entre una gran variedad de respuestas posibles, aquella que más se adapte, no sólo a las características del entorno (dirección de la pelota, posición de recepción,…) sino también a la finalidad que pretenda con su acción (desplazar al contrario, efectuar una dejada,…)
Como es fácil comprender, el papel de los mecanismos de decisión es mucho más importante en las habilidades abiertas que en las cerradas, ya que en las primeras se debe, de forma rápida, escoger de entre un amplio repertorio una respuesta doblemente adecuada (a las características del entorno y a la finalidad de la acción), mientras que en las segundas además de no existir un apremio temporal, la respuesta motora suele estar predefinida.
1.3.3. El mecanismo efector.
Una vez escogida la respuesta motora es necesario programar su ejecución. De ello se encarga el mecanismo efector el cual, respondiendo a la pregunta ¿Cómo hacerlo? es el encargado de definir las condiciones específicas de aplicación del programa motor escogido. Fruto de la actuación del mecanismo decisional, somos capaces de escoger, de entre los almacenados en nuestra memoria, un programa motor que guíe la ejecución de la habilidad motriz deseada.
Los programas motores, pero, no determinan completamente la acción sino que, tal y como ha comentado con anterioridad, responden a la idea de un «esquema» de ejecución (amplio y general para cada familia de movimientos) que debe ser especificado en cada una de sus aplicaciones concretas. Es decir, que almacenamos esquemas motores o patrones motores generalizados que guían a grandes os la ejecución de las habilidades motrices pero que deben, para cada aplicación concreta, ser especificados de acuerdo con las circunstancias específicas que se presenten.
Así estos esquemas indican las trayectorias relativas de los segmentos implicados en la ejecución de la habilidad, así como la duración temporal, también relativa, de las diferentes acciones que la componen, pero no incluyen el grado de fuerza o tensión muscular necesario para su aplicación, su velocidad de ejecución o los músculos concretos que se utilizarán en cada aplicación concreta.
1.3.4. El control de la respuesta motriz,
Como consecuencia de las tres fases o mecanismos tratados hasta el momento se produce por parte del individuo una respuesta motriz adaptada, por un lado a la finalidad para ella prevista y, por otro, a las características del entorno en la que ésta se desarrolla. Esta respuesta, no debe ser considerada como algo fijo e inmutable sino, bien al contrario, cómo un paso más en la ejecución motora susceptible, como explicaremos en estas líneas, de ser valorado y, si es necesario, de ser corregido.
Para que esta valoración sea posible el sujeto debe obtener información sobre la respuesta por él generada. Conocemos como retroacción la información que el sujeto obtiene sobre su propia «ejecución y que le permite no sólo valorarla sino, llegado el caso, efectuar las correcciones necesarias. Así, la retroacción constituiría la información de salida del sistema que, a su vez, se constituirá en una nueva entrada de información que permitirá al sujeto conocer las condiciones de ejecución de la respuesta que ha efectuado.
Se distinguen dos grandes tipos de retroacción: el conocimiento de la ejecución y el conocimiento de los resultados.
El conocimiento de la ejecución aporta información sobre las características espacio-temporales de la respuesta producida, es decir que informa sobre cómo ha sido efectuada ésta.
El conocimiento de los resultados informa sobre los efectos que la respuesta ha producido en el entorno, sobre sus consecuencias.
Imaginemos a un individuo efectuando un lanzamiento de precisión sobre un blanco determinado. El conocimiento de la ejecución le informará sobre cómo ha ejecutado la respuesta, sobre como han ido los movimientos por el generados. El conocimiento de los resultados le proporcionará información sobre si ha conseguido o no el objetivo por el deseado, sobre si ha conseguido hacer puntería sobre el blanco elegido.
Ambos tipos de información se compararán con el modelo inicialmente previsto permitiendo al sujeto, en caso de que exista discordancia entre lo esperado y lo ejecutado, efectuar las correcciones necesarias.
Por otro lado, la retroinformación, al informar sobre las condiciones de ejecución, influye sobre la propia entrada al sistema ya que contribuye a determinar en que aspectos del entorno debemos fijarnos teniendo en cuenta la nueva situación generada por la ejecución de la respuesta. Es decir que la retroinformación influye sobre el mecanismo del filtraje selectivo de las informaciones de entrada al sistema.
Como podemos ver, el control motor no constituye, en la mayoría de los casos, un proceso lineal sino un proceso cíclico en el cual parte de la información de salida se reutiliza, para regular la respuesta, como información de entrada de una nueva ejecución.
2. FACTORES QUE INFLUYEN EN EL APRENDIZAJE MOTOR.
A la hora de analizar el proceso de enseñanza y aprendizaje de las habilidades motrices nos hallamos con que son múltiples y diferenciados los factores que, de una forma u otra, inciden en él, facilitándolo o dificultándolo.
Hemos optado, con el fin de sistematizar estos factores y, de esta forma, facilitar su comprensión, por clasificarlos en tres grandes apartados.
En el primer apartado incluiremos todos aquellos factores que guarden una relación directa con el propio sujeto que se enfrenta al aprendizaje. El nivel de activación de este sujeto así como sus conocimientos previos y relacionados con la habilidad a aprender centrarán los contenidos de este apartado.
En el segundo apartado se tratan aquellos factores relacionados, más que con cualquier otro factor, con la tarea de aprendizaje propuesta. Para ello nos basaremos en el modelo de Welford, analizando qué aspectos pueden condicionar (a nivel perceptivo, decisional o efector) la dificultad de la tarea.
En el último apartado se analizan los factores propios de la situación en la que se produce el proceso de enseñanza y aprendizaje. Así se repasarán aspectos como la transmisión de la información, el tipo y la cantidad de práctica o la especificidad de tal situación.
Somos conscientes de la enorme interrelación que existe entre estos tres apartados. Así, por ejemplo, el nivel de activación de un sujeto enfrentado a una situación de aprendizaje estará en relación directa tanto con el tipo de tarea que intente resolver como con la situación concreta en que lo haga. Si se ha optado por este sistema de clasificación ha sido, únicamente, para facilitar la comprensión de este complejo proceso que es el aprendizaje motor.
2.1. Factores ligados al sujeto
2.1.1.El nivel de activación.
Hoy en día está unánimemente aceptada la idea de que la motivación es una condición básica para el aprendizaje. Lawther [1983] afirma que para aprender el individuo debe enfrentarse ante una situación que le estimule, que le produzca tensión y que le cree unas expectativas. En este sentido aprendemos para equilibramos, para mejorar nuestro bienestar de tal forma que no hay aprendizaje sin inquietud, sin necesidad.
Por otra parte, uno de los efectos de la motivación es el aumento del nivel de estrés o ansiedad que ésta origina, lo que se ha venido a llamar el nivel de activación.
Aunque a primera vista, y después de la lectura del primer párrafo de este punto, podría pensarse que un aumento en el nivel de activación del sujeto que se enfrenta a una situación de aprendizaje siempre lleva aparejada una mejora de este aprendizaje, veremos a continuación que esto no es así, sino que existen numerosos factores que influyen sobre los que podríamos denominar el nivel óptimo de activación.
En la actualidad se habla de un nivel óptimo de activación de cada sujeto para enfrentarse a cada situación de aprendizaje concreta, Es decir que no se puede generalizar, afirmando que tal o cual nivel de activación favorece, en cualquier situación, el aprendizaje, sino que debemos contextualizar en cada sujeto y, más aún, en cada situación de aprendizaje.
Sea como sea, se ha comprobado, tal y como afirman Harris y Harris [1983], que existe un grado óptimo de activación (propio de cada sujeto y de cada ejecución motriz) que posibilita las mejores condiciones de aprendizaje, mientras que niveles de activación inferiores o superiores a él redundan en una disminución de la calidad del aprendizaje.
En la figura 8 se muestra la representación gráfica de éste hecho, en la que se comprueba la relación, en «U» invertida, entre el nivel de activación y el nivel de rendimiento.
Tal y como se ha comentado anteriormente, este nivel óptimo de activación no sólo depende de cada sujeto, sino que depende también de los requerimientos específicos de las tareas incluidas en el proceso de aprendizaje. Así se ha podido comprobar que el nivel óptimo de activación está en relación con la dificultad de la tarea, de tal forma que, a menor dificultad de la tarea a ejecutar, mayor es el nivel de activación permitido mientras que, conforme crece la dificultad de éste, mas debe disminuir, para conseguir resultados máximos., el nivel de activación. La figura 9 muestra este fenómeno.
 Figura 8: Principio de la «U» invertida Figura 9: Relación entre la dificultad de la tarea y el nivel de activación.
Figura 8: Principio de la «U» invertida Figura 9: Relación entre la dificultad de la tarea y el nivel de activación.
Otros autores (Oxendine [1970], en Amold [1981], Schmidt [1993]) han relacionado el nivel óptimo de activación con los requerimientos específicos de la tarea, de tal forma que afirman que, si la tarea requiere, preponderantemente, la contribución de las cualidades físicas (el «vigor físico»‘) admite niveles elevados de activación, mientras que si se trata de una tarea dé precisión, el nivel de activación admitido será considerablemente menor.
Por último, Amold diferencia el nivel óptimo de activación según el momento del aprendizaje, afirmando que, en los niveles iniciales de éste, el alumno suele estar suficientemente motivado hacia el aprendizaje (debido a la curiosidad, a la novedad,…) por lo que el profesor debe abstenerse de intentar motivar de forma extra al alumno. Por contra, en estadios posteriores de este proceso, la monotonía relativa puede ocasionar un descenso en el interés y la motivación del aprendiz,momento en el cual se recomienda el empleo de elementos de motivación «extrínseca».
2.1.2. Los conocimientos previos y la transferencia entre aprendizajes.
Tal y como afirma Riera «El hombre y su comportamiento no pueden entenderse con independencia de sus historia. Por tanto, el pasado, los aprendizajes previos del deportista, influirá en la adquisición de las nuevas relaciones» (Riera [1989], p 100).
En este sentido debemos tener en cuenta, entre otros aspectos, que los programas motores están constituidos por subrutinas o elementos de ejecución automática y que el procesó de construcción/aprendizaje de una nueva habilidad motriz suele resultar de la recombinación de subrutinas, ya aprendidas, en una nueva coordinación global.
Desde este punto de vista es lógico que los aprendizajes previos tengan una gran influencia sobre los nuevos aprendizajes.
Se hace necesario, de esta forma, plantearse qué es lo que ya sabe hacer el aprendiz en relación con lo que debe aprender. Dicho de otra forma se hace necesaria una evaluación del estado inicial del alumno, una evaluación de sus aprendizajes previos, que nos de información sobre el punto de partida individuar década sujeto frente a cada tarea concreta.
A la ya citada relación entre aprendizajes se la conoce con el nombre de Transferencia,siendo éste uno de los conceptos claves no sólo en el aprendizaje motor sino también en la educación física «la transferencia está en el «corazón» de los problemas de la educación física,… (la transferencia) juega un gran papel en el trabajo práctico del motricista” (Parlebas [1981], p 282).
Se habla de transferencia cuando «los resultados de un proceso de aprendizaje o de un ejercicio, tienen influencia en otro proceso de aprendizaje o ejercicio» (Beyer [1987]).
Se distinguen diferentes tipos de transferencia.
-La transferencia positiva se da cuando la influencia ejercida entre una y otra actividad o aprendizaje, redunda en una mejora de la ejecución. Por contra, se cataloga como transferencia negativa cuando estos efectos tienen como consecuencia la disminución en el rendimiento.
-Igualmente se distingue entre transferencia proactiva y transferencia retroactiva.
La primera se da cuando un aprendizaje ya consolidado afecta a un nuevo aprendizaje, es decir cuando algo que ya habíamos aprendido nos facilita o nos dificulta un nuevo aprendizaje. La segunda se da cuando un nuevo aprendizaje afecta a otros ya efectuados, es decir cuando, al aprender un elemento nuevo, varía el rendimiento en otros elementos ya aprendidos.
Existe un cierto acuerdo en relacionar la transferencia entre el aprendizaje de dos habilidades y la similitud de éstas. De esta manera, dos habilidades muy parecidas tendrían, en principio, transferencia de tipo positivo en su aprendizaje, dos habilidades parecidas pero relativamente diferentes se afectarían de forma negativa, mientras que dos habilidades significativamente diferentes no se influenciarían de manera alguna.
2.2. Factores ligados a la tarea.
Tal y como ya se ha comentado se puede considerar el proceso de control motor como un proceso de tratamiento de la información, basándose para ello en el modelo originariamente propuesto por Welford y ampliado después por numerosos autores.
Este modelo contempla la ejecución y el control del movimiento dividido en 3 mecanismos principales sucesivos y altamente interrelacionados como son el mecanismo perceptivo (encargado de proporcionar información sobre el entorno y las propias posibilidades de información), el mecanismo decisional (cuya función es la de decidir, de acuerdo con los objetivos de la tarea y las características del entorno, el tipo de respuesta motora más apropiada para cada situación) y el mecanismo de ejecución (que se encarga de la puesta en práctica de dicha respuesta motora).
Por otro lado tenemos los intentos de clasificación de las tareas y las habilidades motrices, una de cuyas funciones más importantes está en proporcionar al docente (al darle información sobre diferentes aspectos de las tareas que utilizará), una ayuda encaminada a mejorar su actuación educativa.
Basándonos tanto en el modelo de referencia antes citados como en diferentes sistemas de clasificación de las habilidades y de las tareas motrices, se intentará en este apartado aportar algunas sugerencias encaminadas a facilitar el proceso de enseñanza y aprendizaje de las tareas motrices.
2.2.1. Factores ligados al aspecto perceptivo.
a) Habilidades abiertas – habilidades cerradas.
Tal y como se comenta en el tema 9, diversos autores han incidido, a la hora de clasificar las tareas motrices, en el carácter de incertidumbre planteado por el medio en que estas se desarrollan.
Así Poulton, Knapp y Gentile, entre otros, han elaborado sistemas de clasificación que, a grandes rasgos diferencian entre tareas abiertas y tareas cerradas.
Las primeras se caracterizan por tener lugar en un medio inestable y difícilmente previsible, por lo que, en su solución los mecanismos de anticipación serán de vital importancia. Las segundas son propias de entornos estables y, por tanto, previsibles.
Ésta diferenciación de las tareas según la estabilidad del entorno tiene diferentes implicaciones en el proceso de enseñanza de las habilidades motrices.
Primeramente, se debe tener en cuenta que el mecanismo perceptivo cobra, en las habilidades de tipo abierto, una gran importancia dado el carácter inestable del medio y la gran variabilidad de respuestas motoras posibles que ésta genera. Así, el tratamiento pedagógico de este tipo de habilidades debe pasar por un potenciamiento de este mecanismo tanto o más que por un perfeccionamiento de la ejecución motora propiamente dicha. En otras palabras, de poco sirve buscar una ejecución perfecta de un determinado gesto técnico si no se mejoran los aspectos perceptivos (atención selectiva, abstracción de las propiedades del ambiente, mecanismos de anticipación,…) con ella relacionados. Por contra los factores perceptivos de las habilidades cerradas deben centrarse más, dada la estabilidad y predicibilidad del entorno, en las características propias del sujeto ejecutante, es decir que la información del exterior pierde importancia en relación a la información propioceptiva.
b) Tipo y nivel de estimulación perceptiva.
Billing propuso un sistema de clasificación de las tareas motrices basado en el análisis de las características de estas en cada uno de los tres mecanismos implicados en su realización. Posteriormente Sánchez Bañuelos [1984] buscó una aplicación didáctica de éste y de otros sistemas de clasificación para efectuar un análisis de las tareas motrices de tal forma que se pudieran dar indicaciones para su utilización'»‘ educativa. Nos basaremos en este último autor para indicar algunos de los aspectos a tener en cuenta en relación al aprendizaje de las habilidades motrices y sus aspectos perceptivos:
– El número de estímulos a los que es necesario prestar atención para obtener la información necesaria (a mayor cantidad de estímulos mayor dificultad de la tarea).
– El número de estímulos, que aunque no sean significativos para la ejecución de la tarea, están presentes en el ambiente (a mayor cantidad más dificultad).
– La velocidad y duración del estímulo desencadenante de la respuesta (a menor duración mayor dificultad).
– La confusión que puede originar el estímulo (a menor discriminación más dificultad).
Esta información sobre el grado de dificultad objetiva de la tarea va a servir al docente para poder proponer las tareas de enseñanza-aprendizaje en una gradación correcta, desde el punto de vista perceptivo, de menor a mayor dificultad, es decir, a la hora de poder establecer una progresión en la dificultad de las tareas.
Si en educación y aprendizaje, como parece comúnmente aceptado, se debe ir de lo simple a lo complejo, de lo fácil a lo difícil, este tipo de ayudas son de inestimable valor para el docente, al proporcionarle un medio, que él deberá saber adaptar a las diferentes situaciones a las que se enfrente, para estructurar y organizar su actuación educativa.
2.2.2. Factores ligados a la toma de decisión.
Al igual que en el caso del mecanismo perceptivo, se hace necesario un análisis del mecanismo decisional para así aproximamos al nivel de dificultad objetiva de las tareas.
Tal y como hemos afirmado, de forma posterior a la captación de las propiedades del ambiente, se hace necesario decidir, de acuerdo con ellas y con los objetivos de la tarea, qué respuesta se va a llevar a cabo. Esta respuesta se escogerá de entre las almacenadas en la memoria del sujeto fruto de experiencias anteriores.
a) Habilidades abiertas – habilidades cerradas.
Es necesario, en este aspecto, volver a incidir en la diferencia entre las habilidades de tipo cerrado y las de tipo abierto.
Una de las características de las habilidades abiertas es la gran variedad de respuestas motoras posibles, variedad, en principio, ausente en las tareas cerradas. Un atleta enfrentado a la tarea de superar, saltando, una altura determinada, tiene un abanico de respuestas posibles muy reducido (prácticamente un solo modelo sujeto, eso si, a pequeñas variaciones en su ejecución). Por contra, un jugador de balonmano enfrentado a la tarea de intentar meter un gol, puede escoger, según la configuración concreta en la que se halle, entre un número muy grande de alternativas de respuesta.
Este hecho favorece que, en las tareas de tipo cerrado, se busque la perfección en la ejecución, técnicamente correcta, de un gesto determinado que se ha revelado, dado las características del sujeto y los objetivos de la tarea, como el más efectivo para esa situación. Dicho con otras palabras, las tareas de upo cerrado demandan para su correcta ejecución una cierta estereotipación de la respuesta motora.
Por contra, la gran variedad de las respuestas posibles en las tareas de tipo abierto desaconseja la estereotipación de una única respuesta (posiblemente útil en algunos casos pero carente de utilidad en todos los demás) y hace necesaria la existencia de un patrón de ejecución muy rico y adaptable a una multiplicidad de variables ambientales, así como la existencia de unas estrategias correctas de decisión.
Llegados a este punto, una revisión de las tareas más comúnmente utilizadas en la educación física tradicional nos muestra un gran predominio en la utilización de propuestas que potencian poco la capacidad de decisión de los alumnos.
Efectivamente, en una gran parte de las situaciones propuestas el alumno ya sabe (debido al tipo de tareas utilizado y a la metodología de aplicación) de antemano que respuesta deberá ejecutar, con lo que apenas si trabaja el aspecto decisional. Por contra, creemos que este tipo de procesos en los que entra en juego la toma de decisiones, son de un gran valor educativo, por lo que nos parece conveniente animar a una mayor utilización de ellos en la educación física escolar.
b) Factores que condicionan la dificultad, en la toma de decisión, de las tareas motrices.
¿Cómo podemos acercarnos aun conocimiento objetivo de la dificultad, en la toma de decisiones de las tareas?.
Acudiremos de nuevo al análisis de tareas propuesto por Sánchez Bañuelos.
Este autor indica algunos aspectos de las tareas que dificultan la toma de decisión:
– El número y diversidad de las soluciones posibles (a mayor número, más dificultad de la tarea.
– El grado de incertidumbre, es decir la medida en la cual la respuesta es imprevisible (a mayor grado de incertidumbre, mayor dificultad de la tarea).
– El tiempo disponible para efectuar la opción (a menor tiempo disponible, más difícil es la tarea)
-Aunque quizás no sea un factor excesivamente determinante en la educación física escolar, el grado de riesgo que tal decisión implica (al aumentar éste, aumentará la dificultad de la tarea). Al igual que en los aspectos relacionados con el mecanismo perceptivo, un correcto conocimiento de la dificultad de las tareas propuestas en lo relacionado con los mecanismos de decisión permitirá al profesor dosificar la utilización de éstas, graduándola de acuerdo con su dificultad objetiva y facilitando así el proceso de enseñanza-aprendizaje.
2.2.3. Factores ligados a la ejecución de la habilidad.
Al igual que en los dos casos anteriores, el mecanismo de ejecución de la habilidad también debe ser analizado para conocer el grado de dificultad de ésta.
Siguiendo de nuevo a Sánchez Bañuelos, podemos distinguir algunos de los factores que contribuyen a aumentar la dificultad objetiva de las tareas en su aspecto de ejecución:
– El grado de diferenciación segmentaria, es decir la participación variada y diferenciada de múltiples segmentos corporales en la ejecución de la fiabilidad (en principio a mayor grado de intervención, más dificultad en la ejecución)
– El nivel de precisión y de velocidad requeridos en la ejecución (al aumentar el requerimiento tanto de una como de la otra, se dificulta la ejecución de la habilidad).
– El grado de intervención de las cualidades físicas básicas. De esta forma el profesor debe saber valorar hasta que punto influye, en la resolución de una tarea determinada, el aspecto cuantitativo del movimiento. Pongamos un ejemplo. Imaginemos a un profesor intentando enseñar a sus alumnos el lanzamiento de peso. En esta habilidad de tipo cerrado influyen, además del aprendizaje del gesto técnico, otros factores de vital importancia como es el caso de la fuerza rápida de los alumnos. Si en la situación de enseñanza-aprendizaje no se tiene en cuenta el adecuar el peso del artefacto a las posibilidades reales de los alumnos (utilizando un peso superior al que pueden movilizar de forma óptima) podemos llegar a una situación de fracaso, no por que la metodología utilizada o la sucesión de tareas propuestas no sean las correctas, sino porqué no se ha tenido en cuenta el grado de intervención de las cualidades físicas básicas en la ejecución de la habilidad.
2.3. Factores ligados a la situación de enseñanza-aprendizaje.
Dentro de este apartado incluiremos diferentes factores qué influyen sobre el aprendizaje motor y que, de alguna manera, guardan relación, más que con cualquier otro aspecto, con la situación en la que se produce el proceso de enseñanza-aprendizaje.
Somos conscientes de que mezclaremos en este punto aspectos claramente diferenciados los unos de los otros pero creemos que en aras a una mejor sistematización de los contenidos de este tema, vale la pena hacerlo así.
2.3.1. La transmisión de información.
Se trata de la información que el alumno recibe sobre diferentes aspectos de la tarea que debe resolver (información inicial) o sobre su propia ejecución y los resultados de ésta (retroinformación o feedback).
A) Generalidades.
Son numerosos los autores que confieren, a una adecuada transmisión de la información pertinente, un papel de vital importancia en el aprendizaje motor.
Sin embargo existe también acuerdo al afirmar, tal y como lo hace Pieron [1988] que más importante que la cantidad de información o la frecuencia con la que se transmite, es la especificidad de ésta, es decir su grado de relación con la tarea que se desarrolla.
Hay determinados aspectos que, en la transmisión de la información,deben tenerse en cuenta. Primeramente, la información debe ser clara y fácil de comprender, huyendo de lenguajes .complicados y de todo tipo de tecnicismos.También es importante tener en cuenta que es del todo incorrecto «sobrecargar» al alumno con demasiada información ya que éste será incapaz de tratarla en su totalidad.
En este sentido es preferible tratar pocos aspectos en cada sesión los cuales deben lógicamente coincidir con aquellos puntos clave de la habilidad que se esté ejecutando. Es por este motivo que es fundamental que el docente conozca a fondo aquellas habilidades con las que se trabajará y que sepa diferenciar aquellos aspectos que, de ellas, son esenciales de cara a su aprendizaje.
Este hecho se agrava aún más en edades tempranas dado la limitada capacidad de tratamiento de la información durante la infancia, lo que obliga al docente a conseguir que sus alumnos fijen su atención en aquellos aspectos realmente significativos.
Por último se aconseja, de cara a facilitar los aprendizajes, dejar un lapso de tiempo reducido entre la información y la ejecución de la habilidad.
B) La demostración: un comentario crítico.
Una supuesta ayuda metodológica muy utilizada por parte de los profesionales de la educación física es la demostración previa (por parte del profesor o de algún alumno «aventajado») de la habilidad que se pretende enseñar.
Manteniéndonos al margen de consideraciones de tipo pedagógico haremos algunas observaciones relativas a su utilización, con la intención de aportar algunos elementos críticos que, si bien no tienen como fin último descartar la utilización de la demostración, si, como mínimo, alertar sobre los riesgos que ella puede comportar.
Primeramente somos de la opinión que, mediante el uso de la demostración, no sabemos en qué se está fijando el alumno, no pudiendo asegurar, de esta forma, que le llegue la información que a nosotros nos interesa transmitirle.
Igualmente la demostración puede llevar a que el alumno se fije en demasiados aspectos de la habilidad a la vez y que intente reproducirlos, lo que supondría, como se ha comentado anteriormente, una sobrecarga de información que puede llevar al fracaso la tentativa de aprendizaje.
Por último surge la pregunta de si podemos estar seguros de que quien realiza la demostración lo hace de forma suficientemente correcta de tal forma que pueda, realmente, servir de modelo eficaz para los alumnos.
C)El conocimiento de los resultados.
Por «conocimiento de los resultados» (en adelante CR) entendemos toda aquella información que el individuo obtiene sobre los efectos de la acción motriz que ha desarrollado o está desarrollando.
Se trata, como recoge Simonet de un concepto definido en diferentes épocas, con diferentes términos (motivación, recompensa, feed-back, retroinformación,…) lo que puede darnos una idea de las diferentes funciones que se le han asignado en el decurso del tiempo.
Por otro lado, este mismo autor afirma que el CR es una de las variables cruciales dentro del proceso de enseñanza-aprendizaje.
C1) Tipos de CR.
La primera diferenciación que cabe hacer es la que distingue entre el propio CR, definido como un conocimiento de los efectos de la acción ejecutada, y lo que se podría denominar «Conocimiento de la Ejecución” (en adelante CE), entendido como la información que el individuo obtiene sobre, la propia ejecución de esta acción.
Siguiendo a Holding ([1965], podemos señalar diferentes tipos de CR:
– CR extrínseco/intrínseco: por CR intrínseco se conoce a aquella información que se deriva de la propia ejecución normal de la actividad, que es inherente a la tarea ejecutada (por ejemplo en el lanzamiento de dardos, comprobar que puntuación se ha alcanzado. Por CR extrínseco, se conoce a aquella información exterior aportada «artificialmente» al sujeto que ha realizado la tarea.
– CR concomitante/terminal: el CR concomitante es aquel que se obtiene al mismo tiempo que se ejecuta la actividad, mientras que el CR terminal es aquel que se obtiene al concluir ésta,
– CR inmediato/diferido: dependiendo del tiempo que separe el final de la ejecución con la administración de la información, se distingue entre CR inmediato (proporcionado justo al final de la ejecución de la tarea) o diferido (proporcionado al cabo de un tiempo de finalizada la acción).
– CR verbal/no verbal: en función del canal o código utilizado para la transmisión de la Información.
– CR separado/conjunto; se entiende por CR separado aquel que se da de cada una de las diferentes ejecuciones, mientras que por CR conjunto entendemos el que se da del total de las ejecuciones realizadas en un mismo grupo de ensayos.
C2) Implicaciones practicas del CR en el proceso de enseñanza-aprendizaje.
* latencia entre la actividad y el CR.
Diferentes estudios han estudiado los efectos del tiempo transcurrido entre el final de la tarea y la obtención de la información sobre el proceso de aprendizaje. En términos generales se puede afirmar que es un factor de escasa influencia (aunque es necesario recalcar que los lapsos de tiempo dejados en los estudios experimentales son muy reducidos [algunos segundos]). Si que ha demostrado tener una influencia negativa el hecho de intercalar, entre el fin de la actividad y la obtención de la información por parte del sujeto, la ejecución de otra tarea diferente a la practicada.
* Latencia entre el CR y la próxima ejecución.
También se ha estudiado el efecto de la latencia entre el CR y el inicio del próximo ensayo. En este sentido, se puede concluir que es necesario dejar un tiempo prudencial entre la admisión de la información y el re-inicio de la actividad. Este tiempo, que parece utilizarse en la redefinición por parte del sujeto de su plan de acción, guarda relación directa con la complejidad de la tarea, de tal forma qué conforme ésta aumente, más Tiempo deberá dejarse antes de iniciar el ensayo siguiente.
* Precisión del CR.
Parece confirmarse que la precisión en la transmisión de la información es importante de cara a optimizar los resultados. Así, una información clara, precisa y ajustada favorece los aprendizajes. Es importante entender que una información precisa no equivale a una información sobrecargada. Más aún, es necesario saber combinar la precisión con la sencillez y claridad de la información.
Se ha podido igualmente comprobar que, a mayor nivel de ejecución del aprendiz, más necesaria es la precisión de la información proporcionada.
Del mismo modo, la «traducción» de ciertos parámetros cinéticos y cinemáticos tales como recorridos, ángulos, velocidades, fuerzas, etc., en señales concomitantes a la práctica (señales auditivas o visuales) se ha revelado como un factor de ayuda del aprendizaje.
* CR y motivación.
Tal y como afirma Vroom ([1964], el CR tiene una doble función, ya que, además de proporcionar información sobre la ejecución y sus resultados cumple con un cometido de motivación para el practicante.
Así, se ha podido comprobar que, en tareas en las que en principio la carga informativa del CR no es destacable (tareas de fuerza isométrica, velocidad de reacción o resistencia por ejemplo) el resultado se ve mejorado cuando al sujeto se le informa sobre el resultado obtenido y se le anima a mejorarlo.
En relación con la doble función del CR, Newell ([1976], establece la hipótesis, no constatada experimentalmente, de que la función informativa del CR extrínseco pierde importancia conforme más diestro es el practicante y, por tanto, más desarrollados tiene sus mecanismos propios de detección del error. En tales casos, el papel del CR se centra más en aspectos relacionados con la motivación.
* Diferencia entre tareas abiertas y cerradas en relación al CR.,
Se puede afirmar que, en términos generales, el CR es más efectivo en tareas abiertas (aquellas íntimamente relacionadas con el entorno en el que se desarrollan) mientras que es, en las tareas cerradas (aquellas que se ejecutan de forma relativamente independiente del entorno).
2.3.2. La cantidad de práctica.
Los numerosos trabajos de investigación en los que se ha pretendido observar la influencia del tiempo de práctica sobre el resultado final, dan resultados, según Pieron (op cit) diversos e, incluso,contradictorios.
Las palabras de Lawther son esclarecedoras en este sentido «La práctica en si misma, no constituye una garantía de aprendizaje […] La escritura es algo que se practica durante la mayor parte de la vida y sin embargo, es probable que desde hace ya mucho tiempo haya dejado de mejorar y que tienda cada vez a ser menos legible» (Lawther, p 108).
Por tanto, más que buscar altos niveles cuantitativos e indiscriminados de práctica se debe buscar, según Pieron altos niveles de práctica con éxito.
Por práctica con éxito, que se ha revelado como uno de los factores más importantes en el aprendizaje motor, entendemos aquellos momentos de práctica en los que el sujeto ha resuelto satisfactoriamente la tarea propuesta o aquellos pasos que le permitirán llegar a ella
2.3.3. Duración y distribución de la práctica.
Otro aspecto importante es como se organiza el tiempo de práctica. En este sentido es necesario diferenciar entre lo que sería la duración de las diferentes sesiones de aprendizaje (duración de la practica) y lo que haría referencia a la separación entre estas sesiones, el intervalo de tiempo entre sesión y sesión (distribución de la practica).
Ambos factores están condicionados, según Lawther, por diferentes hechos como por ejemplo la edad delos alumnos (a menor edad menor tiempo de práctica seguida), la complejidad de la habilidad a aprender (a mayor complejidad menor duración de las sesiones debido, entre otros aspectos al cansancio que se origina) y el nivel ya alcanzado (los niveles altos de destreza permiten tiempos de práctica superiores).
Por último, y en relación a la distribución de la práctica, parece existir acuerdo en afumar que suelen ser más efectivas las sesiones cortas pero seguidas (diarias) que las sesiones largas pero distanciadas ((días) en el tiempo
2.3.4. La adaptación de la situación de enseñanza-aprendizaje a las características de los alumnos
Es un hecho comúnmente aceptado en la actualidad que, para favorecer el aprendizaje motor es necesario adaptar la situación de aprendizaje a las características y necesidades específicas de los aprendices.
Esta adaptación no puede sólo quedarse en una reducción de diversas magnitudes físicas (tales como dimensiones del terreno de juego, peso o tamaño de los artefactos,…) en relación con la composición corporal de los alumnos.
Más allá, es necesario adaptar los aspectos normativos de la tarea, cambiando reglamentos y condiciones de ejecución de tal forma que se adapte la actividad, no sólo a las características físicas de los sujetos, sino al conjunto de sus necesidades.
Igualmente se debe saber adaptar los objetivos y los medios de aplicación, es decir debemos saber producir una adaptación pedagógica. En efecto, cada momento del aprendizaje, cada situación concreta, requiere una forma específica de intervención educativa, que el profesor deberá saber valorar y aplicar.
2.3.5. La especificidad de la «situación deenseñanza aprendizaje.
Respetando la anteriormente comentada necesidad de adaptar la situación de práctica a las características y necesidades de los alumnos cada vez se acepta más el hecho de que el aprendizaje de una habilidad debe efectuarse en una situación lo más próxima posible a la aplicación real de ésta.
Efectivamente, si aceptamos que una habilidad motriz no se limita al movimiento que se genera (siendo éste último sólo la manifestación observable de ésta) sino que implica a toda una serie variada de procesos de diversa índole, no nos costará comprender que, al practicar un movimiento de forma descontextualizada de la situación en que se ejecuta en la realidad, no hacemos más que incidir solamente sobre algunos aspectos de la habilidad (mecanismo de ejecución) olvidando la mejora de otros mecanismos como el perceptivo y el decisional.
Es por ello que, siguiendo a Arnold afirmamos que es necesario replantearse la enseñanza de las habilidades específicas, propiciando la utilización de situaciones próximas a la realidad en lugar de situaciones neutras y descontextualizadas.
Imaginemos, por ejemplo, el caso de un pase en un juego colectivo, por ejemplo el fútbol. Si nos limitamos a proponer a nuestros alumnos que practiquen la técnica de ejecución del pase estaños descuidando el tratamiento de otros factores tan importantes como el «donde» pasar, «cuando» pasar o «a quién» pasar el balón, aspectos tan importantes o más que el propio movimiento, que la propia ejecución técnica de la habilidad.
Es por ello que proponemos una práctica cercana a situaciones reales, en la que todos los aspectos de la habilidad puedan verse desarrollados.
Somos conscientes de la dificultad, en determinadas ocasiones, de combinar la adaptación de la situación de enseñanza-aprendizaje a las características del alumno con la necesidad de la práctica cercana a situaciones reales. Muchas veces la situación real supone un nivel de complejidad superior al que pueden admitir los alumnos implicados en el proceso de aprendizaje. Es por ello que la figura del profesor, capaz de crear y proponer situaciones de «tránsito» cercanas a las posibilidades de los alumnos pero tendentes a adoptar tas características de la situación real de aplicación, es de vital importancia en el proceso educativo.
BIBLIOGRAFIA
1. Bibliografía consultada.
BEYER, E. (Editor) [1987]: Dictionnaire des sciencies du sport. Allemand, anglais, franjáis. KartHofmann, Schomdorf.
DURAND, M. [1988]: El niño y el deporte. Paidos, Barcelona.;
FAMOSE, P. [1992]: Aprendizaje motor y dificultad de la taiejt Paidotribo, Barcelona.
HARRIS, DV. HARRIS, BL. [1987]: Psicología del deporte. Híspano-Europea, Barcelona.
LAWTHER, JD. [1983]: Aprendizaje de las habilidades motrices. Paidos, Barcelona.
PARLEBAS, P. [1981]: Ccwítribution a un lexique commente en science de l’action motrice. INSEP,París.
RIERA, J. [1989b]: Fundamentos del aprendizaje de la técnica y la táctica deportivas. INDE,Barcelona.
RIGAL, R. [1987]: Motricidad humana. Fundamentos y aplicaciones pedagógicas. Pila Telena, Madrid.
SCHMIDT, RA [1982]: Motor control and leaming. A behavioral emphasis. Human Kineticks,Champaign.
SCHMIDT, RA. [1993]: Appreijtissage moteur«performance. Vigot, París.
SINGER, RN. [1986]: El aprendizaje de las acciones motrices en el deporte. Hispano Europea, Barcelona.
2. Bibliografía recomendada.
RIERA, J. [1989a]: Aprendizaje motor. En Bayés, R. y Pinillos, JL. (Eds) [1989] Aprendizaje y condicionamiento. Alhambra, Madrid.
SÁNCHEZ BAÑUELOS, F. [1984]: Bases para una didáctica de la educación física y el deporte.Gymnos, Madrid.
SIMONET, P. (1985]: Apprentissages moteuis. Processus et procedes d’acquisition. Vigot, París.






No está firmado, me gustaria saber quien es el autor ya que:
– O es mi profesor de Aprendizaje motor
– O lo ha copiado todo de aquí…
Está muy bien explicado, me ha ayudado para los examenes.
Gracias.